在電機無感控制算法方面�,TI提供了eSMO滑模觀測器來計算電機轉子角度. 在應用方面,TI提供了eSMO lib文件和相關文檔說明eSMO的使用,但是在使用過程中�,可能沒法從相關文檔上理解Fsmopos和Gsmopos的含義,不方便調試. 因此本篇主要推導 TI eSMO電流計算公式���,并導出Fsmopos和Gsmopos(分別簡稱F和G)公式�,同時我們可以從推導出的公式看到TI 的計算和其他F和G的計算方式的差別,加深理解和熟練應用. PMSM在靜止α��、β坐標系下的數(shù)學模型如下: 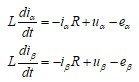 (1) (1) 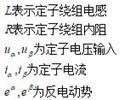
TI eSMO滑模觀測器結構數(shù)學模型如下 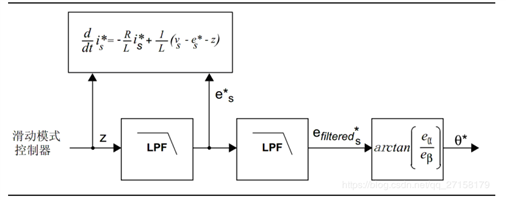
從結構上看����,比較清晰明了,使用開關切換函數(shù)估算反電動勢,從而求得電機轉子角度. 從而我們可以得到以下的觀測器表達式 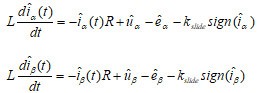
其中 
基于以上公式,我們在α軸上求解eSMO電流���,類似地可以求得β軸電流公式. 單位辦理工程資質需要多本通信工程師職稱證書掛資質�����,價格美麗�,聯(lián)系我15007599549微同 
電流在時域下的解為: 
對應離散時間Ts的電流解為  (1) (1)
從而得到:  (2) (2)
(2) – (1)得到 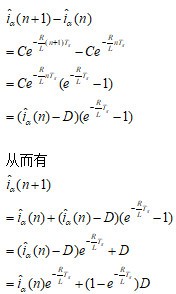
從而可以得到 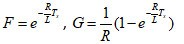
注意: 如果離散時間Ts足夠小�����,可以使用 近似. 近似. 那么就有 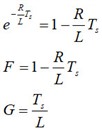
這樣就跟其他非指數(shù)形式的表達式一樣. 此帖出自微控制器 MCU論壇 | 




